LST le Star Trk
Étoile de mer intergalactique, sans doute

Messages entrants dans le module :
commande des LED :
/LTS/LED <led nb> <0 ou 1> led nb de 0 à 4, 255 commande toutes les ledscommande du voyant :
/LTS/VOY <0 à 255>réglages de la molette :
/LTS/MPG/S2 <set point 0 – 57600> // place l'encodeur à une valeur donnée
/LTS/MPG/S3 <set point 0 – 65535> // place le potentiomètre virtuel à une valeur donnée
/LTS/MPG/M3 <minimum> <maximum> // fixe les butées mini et maxi du potentiomètre virtuel 0 – 65535Messages sortant du module :
Bouton sur la boîte :
/LTS/BAS <inter> <BP>Nunchuck :
/LTS/NCK <BP rond><BP carré><joystickX><joystickY><accelX><accelY><accelZ>Joystick beige :
/LTS/JOY <joyX><joyY><BP1><BP2><BPsur manche>speedKing :
/LTS/GP1 <haut><bas><gauche><droite><gachette>joystickNoir :
/LTS/GP2 <haut><bas><gauche><droite><BP rouge>NesPad :
/LTS/NES <haut><bas><gauche><droite><select><start><B><A>Encodeur rotatif :
/LTS/MPG <vitesse angulaire> <position sur 40 tours (0-57600)><position potentiomètre à
butées><accélération angulaire> Si la roue est en mouvement, envoi de sa position relative toutes les 50 ms
Récepteur RFID :
/LTS/TAG <MSB> <Byte> <Byte> <LSB>si plusieurs tags présents envoie successivement chaque tag
pédale d'expression
Ajout mai 2024
/LTS/PED [0-255]
/LTS/JAK [BP1] [BP2] [BP3] [BP4]Active sensing :
/LTS/sens <int> envoie une valeur qui s’incrémente toutes les secondes. + l’état des boutons et des potentiometres à tour de rôle toutes les secondes
raccordements MAX6956
| port | HMI |
|---|---|
| 12 | Joystick Taïwanais (noir avec gros BP jaune) |
| 13 | Joystick Taïwanais |
| 14 | joystick Taïwanais |
| 15 | joystick Taïwanais |
| 16 | joystick Taïwanais |
| 17 | Speed King |
| 18 | Speed King |
| 19 | Speed King |
| 20 | Speed King |
| 21 | Speed King |
| 22 | 3 BP du joystick beige |
| 23 | 3 BP du joystick beige |
| 24 | 3 BP du Joystick beige |
| 26 | BP face avant |
| 26 | BP face avant |
| 27 | LED 0 |
| 28 | LED 1 |
| 29 | Led 2 |
| 30 | Led 3 |
| 31 | Led 4 |
sortie D3 : LED rouge gros voyant PWM
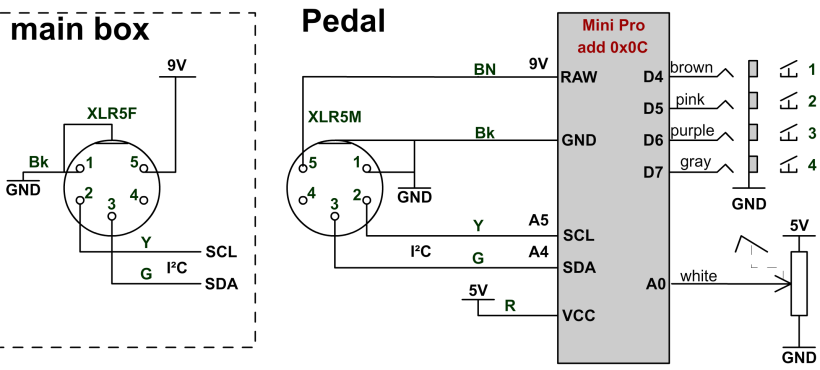
ajout pédale d'expression (mai 2024)
- installation d'une prise XLR5 sur la face arrière
- fiche male raccordée à une pédale d'expression contenant un minipro
- sortie cable I2C par trou jack exp
- 4 autres jacks modifiés pour entrées 4 BP
- fonctionnement en 5 volt (prise XLR5 toujours en 9V)
- adresse pour la pédale : 0x0C (differente de pedale GTC et gyropédale GTC)
- ajout d'une entrée midi impossible (RAM trop petite)
pour rappel : pédales GTC = 0x0A et 0x0B ==> compatibles
0x1 carte mère = OK
max6956(0x46)=OK
nunchuck 0x52 = OK
lecteur RFID 0x5 = OK
molette 0x4 = OK
adresse pour la pédale : 0x0C

microprogramme
pedal
// nano mini pro 16MHz 328P "n 5V, reglé sur 5V dans l'IDE
//sur bus @12 0xC
#include <Wire.h>
#include <Bounce2.h>
#define BP0 4
#define BP1 5
#define BP2 6
#define BP3 7
// Instantiate a Bounce object with a 15 millisecond debounce time
Bounce bouncer0 = Bounce( BP0, 15 );
Bounce bouncer1 = Bounce( BP1 , 15 );
Bounce bouncer2 = Bounce( BP2, 15 );
Bounce bouncer3 = Bounce( BP3 , 15 );
uint8_t dataToSend[] = {0, 0, 0}; // analog ped value, BP's(bitwrite), dummy
int tempVal = 0;
long meanVal = 0;
long counter = 0;
void setup() {
pinMode(BP0, INPUT);
pinMode(BP1, INPUT);
pinMode(BP2, INPUT);
pinMode(BP3, INPUT);
digitalWrite(BP0, HIGH);
digitalWrite(BP1, HIGH);
digitalWrite(BP2, HIGH);
digitalWrite(BP3, HIGH);
//Serial.begin (57600);
Wire.begin(0xC); // join i2c bus with address #C (12)
Wire.onRequest(requestEvent); // register event
}
void loop() {
// Update the debouncer
bouncer0.update ( );
bouncer1.update ( );
bouncer2.update ( );
bouncer3.update ( );
// Get the update value
bitWrite(dataToSend[1], 0, 1 - (1 & bouncer0.read()) );
bitWrite(dataToSend[1], 1, 1 - (1 & bouncer1.read()) );
bitWrite(dataToSend[1], 2, 1 - (1 & bouncer2.read()) );
bitWrite(dataToSend[1], 3, 1 - (1 & bouncer3.read()) );
//if(counter < 200000){
// meanVal += analogRead(A0);
// counter++;
//}
delay(1);
}
void requestEvent()
{
//tempVal = meanVal/counter;
tempVal = map(analogRead(A0), 0, 1024, 0, 255);
tempVal = constrain(tempVal, 0, 255);
dataToSend[0] = uint8_t(tempVal);
Wire.write(dataToSend, 2);
}
main
//uno on board
//pour 1.8.5 max
//réseau I2C : Master@0x1,RFID@0x3 MPG@0x4, MAX6956@0x46, Nunchuck@0x52, pedale expression@0xC
//ajout pedale expression en I2C
#define pedal
//#define midiInput MIDI NE FONCTIONNE PAS CAR MEMOIRE RAM TROP CHARGEE
// ajout RFID reader en I2C
//detecteur RFID sur OSC
//lecteur RFID sur bus I2C
//Minitel sur port série NON
// mise à jour pour 1.0.1
// ajouter envoi de BP avec active sens
// 3 entrées en reserve et 4 LED sur MAX6956
// 2 port manette db9
// 1 port gamepad
// 1 nunchuck
#include <Wire.h>
#include <SPI.h>
#include <Ethernet.h>
#include <ArdOSC.h>
#include <NESpad.h>
#define reset 9 // reset du wiznet, active low
#ifdef midiInput
#define serial_activate 8 // mise en service du midi in
#include <MIDI.h>
MIDI_CREATE_DEFAULT_INSTANCE();
unsigned int noteStateCh[128]; // 16ch x 128 notes, un bit par note ==> 256 octets
long int timeNoNoteSafety;
int NoteStatesPrev;
//byte isNRPN = 0;
//byte NRPN[] = {0, 0, 0, 0, 0};
//long int timeNRPN = 0;
//byte NRPNsending = 0;
char oscAdrMinCC[] = "/LTS/Min/CC";
//char oscAdrMinNRPN[] = "/LTS/Min/NRPN";
char oscAdrMinNon[] = "/LTS/Min/Non";
char oscAdrMinNof[] = "/LTS/Min/Nof";
char oscAdrMinPC[] = "/LTS/Min/PC";
char oscAdrMinATc[] = "/LTS/Min/ATc";
//char oscAdrMinATp[] = "/LTS/Min/ATp";
char oscAdrMinPB[] = "/LTS/Min/PB";
char oscAdrNoNoteSafety[] = "/LTS/noNoteSafety"; //<ch0 à 7> <ch8 à 15> deux bytes, chaque bit correspond à l'état d'un cana#endif
#endif
// put your own strobe(2)/clock(4)/data(7) pin numbers here -- see the pinout in readme.txt
/*
NES Joystick connector pinout:
(1) GND <- Brown
White -> +5V (5) (2) CLOCK <- Red
NC (6) (3) STROBE <- Orange
NC (7) (4) DATA <- Yellow
*/
NESpad nintendo = NESpad(2,4,7);
byte padState = 0;
byte padState_prev = 0;
#include <Statistic.h>
Statistic joyX;
Statistic joyY;
Statistic AxisX;
Statistic AxisY;
Statistic AxisZ;
int z_button1 = 1;
int c_button1 = 1;
int joy_x_axis1 = 127;
int joy_y_axis1 = 127;
int accel_x_axis1 = 0;
int accel_y_axis1 = 0;
int accel_z_axis1 = 0;
int JoyX = 0;
int JoyY = 0;
int JoyX_prev = 0;
int JoyY_prev = 0;
long timeX = 0;
//////////////////////////////
unsigned long time_roue = 0;
long int data1 = 0; // incrementale
long int data1_prev = 0; // pour le calcul de l'acceleration angulaire
unsigned int data2 = 0; // absolue
unsigned int data2_prev = 0; // pour détecter un changement de valeur
long int data3 = 0; // pot 360 points avec butées (0 et maxData3)
long int data3_prev = 0; // pour détecter un changement de valeur
unsigned int minData3 = 0; //par defaut reglé à 0 points
unsigned int maxData3 = 600; //par defaut reglé à 600 points
long int data4 = 0;
byte jetonMPG = 0;
//
long int timeRFID = 0;
byte buf[] = {0,0,0,0,0,0,0};
byte buf_prev[] = {0,0,0,0,0,0,0};
//
uint8_t outbuf1[6]; // array to store Nunchuck output
int cnt = 0;
int AsensNb = 0;
unsigned long time_send_AS = 0;
unsigned long time_send_NUN = 0;
byte c_button1_prev = 0;
byte z_button1_prev = 0;
int accel_x_axis1_prev = 0;
int accel_y_axis1_prev = 0;
int accel_z_axis1_prev = 0;
int joy_x_axis1_prev = 0;
int joy_y_axis1_prev = 0;
uint8_t Xcenter = 121;
uint8_t Ycenter = 126;
byte myMac[] = { 0x10, 0x35, 0x11, 0x11, 0x88, 0x88 };
byte myIp[] = { 192, 168, 0, 188};
byte destIp[] = { 192, 168, 0, 255 };
int destPort = 6666;
int serverPort = 1510;
OSCServer server;
OSCMessage *rcvMes;
OSCClient client;
char oscAdrLED[] = "/LTS/LED";
char oscAdrVOY[] = "/LTS/VOY";
char oscAdrAsens[] = "/LTS/sens";
char oscAdrNunchuck[] = "/LTS/NCK";
char oscAdrNesPad[] = "/LTS/NES"; //entrée
char oscAdrGamePad1[] = "/LTS/GP1"; //entrée
char oscAdrGamePad2[] = "/LTS/GP2"; //entrée
char oscAdrJoystick[] = "/LTS/JOY"; //joystick + 3BP
char oscAdrBase[] = "/LTS/BAS"; //les 2 BP sur la base
char oscAdrRFID[] = "/LTS/TAG"; //numero du TAG
char oscAdrMPG[] = "/LTS/MPG"; //encodeur rotatif (Manual Pulse Generator)
char oscAdrMPGS2[] = "/LTS/MPG/S2";
char oscAdrMPGS3[] = "/LTS/MPG/S3";
char oscAdrMPGM3[] = "/LTS/MPG/M3";
char oscAdrSetup[] = "/LTS/SETUP";//indique les etats des satelites au demarrage
char oscAdrPedal[] = "/LTS/PED"; //volume 0 à 255 (les 4 boutons latéraux sont traités comme des BP avec oscAdrDin[]
char oscAdrDin[] = "/LTS/JAK"; //entrée jack
//ATU/////////////////////////
byte ATU = 0; // innibition des sorties
long veille_ATU = 0; // mesure du temps entre 2 reception de /ATU
byte send_ANO = 0; // mémorisation de l'envoi du all-note-off
byte send_ANO_ATU = 0; // mémorisation de l'envoi du all-note-off en cas de ATU = 0
byte ANO_done = 0;
//LED/////////////////////////
byte LedOnOff[] = {0,0,0,0,0};
////////////////////////////BP state and debouncer
byte A = 0;
byte B = 0;
byte C = 0;
byte BP_state[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
byte BP_laststate[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
byte statebit[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
byte BP_prev[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
unsigned long lastDebounceTime[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
byte debounceDelay = 20;
long present_time = millis();
unsigned long time_send = 0;
byte input_to_send = 0;
//unsigned long IDnum = 0;
byte sendZero = 1;
////////////////////////////
//pedal stuff
byte pedalPresent = 0;
uint8_t pedalVal = 0;
uint8_t prevPedalVal = 0;
uint8_t BPSideVal = 0;
long timeSendPedal = millis();
long timeCheck = 0;
////////////////////////////
void setup ()
{
#ifdef midiInput
pinMode(serial_activate, OUTPUT);
digitalWrite(serial_activate,LOW);//désactive l'entrée série venant du minitel
MIDI.setHandleNoteOn(handleNoteOn); // Put only the name of the function
MIDI.setHandleNoteOff(handleNoteOff);
MIDI.setHandleControlChange(handleControlchange);
MIDI.setHandlePitchBend(handlePitchBend);
MIDI.setHandleProgramChange(programChange);
MIDI.setHandleAfterTouchChannel(afterTouchChannel);
//MIDI.setHandleAfterTouchPoly(afterTouchPoly);
#endif
pinMode(3,OUTPUT); //LED rouge en PWM
analogWrite(3,0);
//Serial.begin (38400);//debugg
Wire.begin (0x01); // join i2c bus with address//deja initialisé par nfc
nunchuck_init (); // send the initilization handshake
max6956_init (0x46);
//séquence de reset du wiznet
pinMode(reset, OUTPUT);
delay(1000); //temps pour que l'esclave I2C demarre
digitalWrite(reset, HIGH);
delay(100);
digitalWrite(reset, LOW);
delay(100);
digitalWrite(reset, HIGH);
delay(300);
Ethernet.begin(myMac ,myIp);
server.begin(serverPort);
delay(2000);
OSCMessage mes;
mes.setAddress(destIp, destPort);
mes.beginMessage(oscAdrSetup);
mes.addArgString("LTS loading");
client.send(&mes);
mes.flush();
//set callback functions & oscaddress
server.addCallback(oscAdrLED,&funcLED);
server.addCallback(oscAdrVOY,&funcVOY);
server.addCallback("/ATU",&funcATU);
//server.addCallback("/ANO",&funcANO);
server.addCallback(oscAdrMPGS2,&funcS2MPG);
server.addCallback(oscAdrMPGS3,&funcS3MPG);
server.addCallback(oscAdrMPGM3,&funcMAX3MPG);
for (byte i = 0;i<255;i++) {
analogWrite(3,i);
delay(30);
}
LedOnOff[0] = 1;
LedOnOff[1] = 1;
LedOnOff[2] = 1;
LedOnOff[3] = 1;
LedOnOff[4] = 1;
LED_to_MAX6956();
//Statistic
joyX.clear();
joyY.clear();
AxisX.clear();
AxisY.clear();
AxisZ.clear();
delay(200);
LedOnOff[0] = 0;
LedOnOff[1] = 0;
LedOnOff[2] = 0;
LedOnOff[3] = 0;
LedOnOff[4] = 0;
LED_to_MAX6956();
analogWrite(3,0);
veille_ATU = millis();
// readNunchuck_setup();
// Xcenter = outbuf1[0];
// Ycenter = outbuf1[1];
//Serial.write("setup done");
//check for pedal
Wire.requestFrom(0xC, 2); // request 3 byte
while (Wire.available() )
{
byte tempPedalVal = Wire.read(); //dummy
pedalPresent = 1;
}
delay(5);
if (pedalPresent == 1) {
OSCMessage mes;
mes.setAddress(destIp, destPort);
mes.beginMessage(oscAdrSetup);
mes.addArgString("Pedal connected");
client.send(&mes);
mes.flush();
}
else {
//Serial.println("WARNING Pedal not connected");
OSCMessage mes;
mes.setAddress(destIp, destPort);
mes.beginMessage(oscAdrSetup);
mes.addArgString("WARNING Pedal not connected");
client.send(&mes);
mes.flush();
}
#ifdef midiInput
// Initiate MIDI communications, listen to all channels
MIDI.begin(MIDI_CHANNEL_OMNI);
digitalWrite(serial_activate, HIGH);//activation du midi in
#endif
}I2C
void max6956_init (byte add)
{
Wire.beginTransmission (add); // transmit to inputs
Wire.write (0x02); // sends register address (global current)
Wire.write (0x01); // sends set global current to 10x1.5mA = 15mA.
Wire.endTransmission (); // stop transmitting
Wire.beginTransmission (add); // transmit to inputs
Wire.write (0x04); // sends register address (config)
Wire.write (0x01); // sends set transition detect = 0 /global current set = 1 / normal op.
Wire.endTransmission (); // stop transmitting
Wire.beginTransmission (add); // transmit to inputs
Wire.write (0x09); // sends register address (port config)
Wire.write ((byte)0x00);
Wire.write ((byte)0x00);
Wire.write (0xFF); // sends set port 12-31 inputs with PullUp R
Wire.write (0xFF);
Wire.write (0xFF);
Wire.write (0x3F); // port 27 = LED0...port 31 = LED4
Wire.write ((byte)0x00); // set last 5 ports as led drivers
Wire.endTransmission (); // stop transmitting
}
void nunchuck_init ()
{
Wire.beginTransmission (0x52); // transmit to device 0x52
Wire.write (0x40); // sends memory address
Wire.write ((byte)0x00); // sends sent a zero.
Wire.endTransmission (); // stop transmitting
}
void send_zero ()
{
Wire.beginTransmission (0x52); // transmit to device 0x52
Wire.write ((byte)0x00); // sends one byte
Wire.endTransmission (); // stop transmitting
}
void readNunchuck() {
Wire.requestFrom (0x52, 6); // request data from nunchuck
while (Wire.available ())
{
outbuf1[cnt] = nunchuk_decode_byte (Wire.read ()); // receive byte as an integer
//digitalWrite (ledPin, HIGH); // sets the LED on
cnt++;
}
// If we received the 6 bytes, then go print them
if (cnt >= 5)
{
print ();
}
cnt = 0;
send_zero (); // send the request for next bytes
//delay (5);
}
void readNunchuck_setup() {
Wire.requestFrom (0x52, 6); // request data from nunchuck
while (Wire.available ())
{
outbuf1[cnt] = nunchuk_decode_byte (Wire.read ()); // receive byte as an integer
cnt++;
}
cnt = 0;
send_zero (); // send the request for next bytes
//delay (5);
}
void Get_inputs(byte add) { //les 15 entrées TOR
{
Wire.beginTransmission (add); // transmit to device
Wire.write (0x4C); //8 ports 12-19
Wire.endTransmission (); // stop transmitting
Wire.requestFrom((byte)add, (byte)1); // request 1 byte
while (Wire.available() )
{
A = Wire.read();
}
A = ~A; // traitement (BP cablés en logique négative)
Wire.beginTransmission (add); // transmit to device
Wire.write (0x54); //8 ports 20-27
Wire.endTransmission (); // stop transmitting
Wire.requestFrom((byte)add, (byte)1); // request 1 byte
while (Wire.available() )
{
B = Wire.read();
}
B = ~B; // traitement (BP cablés en logique négative)
for(byte i = 0; i<8; i++)
{
statebit[i] = bitRead(A, i);
statebit[i+8] = bitRead(B, i);
}
for(byte i = 0; i<16; i++)
if(statebit[i] != BP_prev[i])
{
lastDebounceTime[i] = millis();
}
else{}
}
present_time = millis();
for(byte i = 0; i<16; i++)
{
if ((present_time - lastDebounceTime[i]) > debounceDelay) {
BP_state[i] = statebit[i];
}
else{}
}
//le port gamepad 1
if (BP_laststate[0] != BP_state[0] ||
BP_laststate[1] != BP_state[1] ||
BP_laststate[2] != BP_state[2] ||
BP_laststate[3] != BP_state[3] ||
BP_laststate[4] != BP_state[4]
) {
GP1toOSC();
for(byte i = 0; i < 5; i++) {
BP_laststate[i] = BP_state[i];
}
}
else{}
for(byte i = 0; i < 5; i++) {
BP_prev[i] = statebit[i];
}
//le port gamepad 2
if (BP_laststate[5] != BP_state[5] ||
BP_laststate[6] != BP_state[6] ||
BP_laststate[7] != BP_state[7] ||
BP_laststate[8] != BP_state[8] ||
BP_laststate[9] != BP_state[9]
) {
GP2toOSC();
for(byte i = 5; i < 10; i++) {
BP_laststate[i] = BP_state[i];
}
}
else{}
for(byte i = 5; i < 10; i++) {
BP_prev[i] = statebit[i];
}
//le joystick...
if (BP_laststate[10] != BP_state[10] ||
BP_laststate[11] != BP_state[11] ||
BP_laststate[12] != BP_state[12]
) {
JOYtoOSC();
for(byte i = 10; i < 13; i++) {
BP_laststate[i] = BP_state[i];
}
}
else{}
for(byte i = 10; i < 13; i++) {
BP_prev[i] = statebit[i];
}
if ((BP_laststate[13] != BP_state[13])
|| (BP_laststate[14] != BP_state[14]))
{
BaseToOSC();
BP_laststate[13] = BP_state[13];
BP_laststate[14] = BP_state[14];
}
else{}
BP_prev[13] = statebit[13];
BP_prev[14] = statebit[14];
//les 4 BP de la pédale d'expression
if(pedalPresent == 1){
if ((BP_laststate[16] != BP_state[16])
|| (BP_laststate[17] != BP_state[17])
|| (BP_laststate[18] != BP_state[18])
|| (BP_laststate[19] != BP_state[19]))
{
jackBPToOSC();
BP_laststate[16] = BP_state[16];
BP_laststate[17] = BP_state[17];
BP_laststate[18] = BP_state[18];
BP_laststate[19] = BP_state[19];
}
else{}
BP_prev[16] = statebit[16];
BP_prev[17] = statebit[17];
BP_prev[18] = statebit[18];
BP_prev[19] = statebit[19];
}
}
void LED_to_MAX6956()
{
Wire.beginTransmission (0x46); // transmit to outputs
Wire.write (0x3B); // output P27
Wire.write (LedOnOff[0]); // P27 led 0
Wire.write (LedOnOff[1]); // P28 led 1
Wire.write (LedOnOff[2]); // P29 led 2
Wire.write (LedOnOff[3]); // P30 led 3
Wire.write (LedOnOff[4]); // P31 led 4
Wire.endTransmission () ; // stop transmitting
}callbacks
// callback fonctions messages OSC entrants
void funcATU(OSCMessage *_mescurrent){
ATU = _mescurrent->getArgInt32(0);
veille_ATU = millis();
//send_ANO_ATU = 0;
}
void funcANO(OSCMessage *_mescurrent){
send_ANO = 0;
}
void funcLED(OSCMessage *_mescurrent){ // les voyants au dessus des BP
byte lednb = (long int)_mescurrent->getArgInt32(0);
byte ledstate = (long int)_mescurrent->getArgInt32(1);
if(lednb < 5)
{
if(ledstate == 1)
{
LedOnOff[lednb] = 1;
}
else
{
LedOnOff[lednb] = 0;
}
}
else if (lednb == 255)//toutes les LED
{
for(byte n = 0; n < 5; n++)
{
LedOnOff[n] = ledstate;
}
}
else{}
LED_to_MAX6956();
}
void funcVOY(OSCMessage *_mescurrent){ // le voyant du dessus
byte ledIntensity = (long int)_mescurrent->getArgInt32(0);
analogWrite(3,ledIntensity);
}
///////////////////////////////////////////////////
void funcS2MPG(OSCMessage *_mescurrent) { //
unsigned int newValueMPG = (long int)_mescurrent->getArgInt32(0);
if(newValueMPG >= 60000) {
newValueMPG = 0;
}
data2 = newValueMPG;
jetonMPG = 0;
}
void funcS3MPG(OSCMessage *_mescurrent) { //
unsigned int newValueMPG = (long int)_mescurrent->getArgInt32(0);
if(newValueMPG >= maxData3) {
data3 = maxData3;
}
else if(newValueMPG <= minData3) {
data3 = minData3;
}
else {
data3 = newValueMPG;
}
jetonMPG = 0;
}
void funcMAX3MPG(OSCMessage *_mescurrent) { //
unsigned int newValueMPGmini = (long int)_mescurrent->getArgInt32(0);
unsigned int newValueMPGmaxi = (long int)_mescurrent->getArgInt32(1);
if(newValueMPGmini >= 65534) {
minData3 = 65534;
}
else if(newValueMPGmini <= 0) {
minData3 = 0;
}
else {
minData3 = newValueMPGmini;
}
if(newValueMPGmaxi >= 65535) {
maxData3 = 65535;
}
else if(newValueMPGmaxi <= 1) {
maxData3 = 1;
}
else {
maxData3 = newValueMPGmaxi;
}
}
///////////////////////////////////////////////////midi to OSC (not active)
// This function will be automatically called when a NoteOn is received.
// It must be a void-returning function with the correct parameters,
// see documentation here:
// http://arduinomidilib.fortyseveneffects.com/a00022.html
#ifdef midiInput
void handleNoteOn(byte channel, byte pitch, byte velocity)
{
send3integers(oscAdrMinNon, channel, pitch, velocity);
bitWrite(noteStateCh[pitch], channel - 1, 1);
}
void handleNoteOff(byte channel, byte pitch, byte velocity)
{
// Note that NoteOn messages with 0 velocity are interpreted as NoteOffs.
send3integers(oscAdrMinNof, channel, pitch, velocity);
bitWrite(noteStateCh[pitch], channel - 1, 0);
}
void handlePitchBend(byte channel, int pitchBend)
{
send2integers(oscAdrMinPB, channel, pitchBend);
}
void handleControlchange(byte channel, byte CCnum, byte value)
{
/* if (CCnum == 99) {
isNRPN = 1;
NRPN[0] = channel;
NRPN[1] = value;
}
else if (CCnum == 98) {
isNRPN = 1;
NRPN[2] = value;
}
else if (CCnum == 6 && isNRPN == 1) {
NRPN[3] = value;
}
else if (CCnum == 38&& isNRPN == 1) {
NRPN[4] = value;
send3integers(oscAdrMinNRPN, NRPN[0], NRPN[1] << 7 | NRPN[2], NRPN[3] << 7 | NRPN[4]);
isNRPN = 0;
}
else {*/
send3integers(oscAdrMinCC, channel, CCnum, value);
//}
/*
if (millis() - time > 20) {
isNRPN = 0;
}
else {}
*/
}
void afterTouchChannel(byte channel, byte value)
{
send2integers(oscAdrMinATc, channel, value);
}
void programChange(byte channel, byte value)
{
send2integers(oscAdrMinPC, channel, value);
}
/*void afterTouchPoly(byte channel, byte pitch, byte aftertouch)
{
send3integers(oscAdrMinATp, channel, pitch, aftertouch);
}*/
void send3integers(char* oscAdr, int int1, int int2, int int3) {
OSCMessage message;
message.setAddress(destIp, destPort);
message.beginMessage(oscAdr);
message.addArgInt32(int1);
message.addArgInt32(int2);
message.addArgInt32(int3);
client.send(&message);
message.flush();
}
void send2integers(char* oscAdr, byte byte1, byte byte2) {
OSCMessage message;
message.setAddress(destIp, destPort);
message.beginMessage(oscAdr);
message.addArgInt32(byte1);
message.addArgInt32(byte2);
client.send(&message);
message.flush();
}
#endif
loop
void loop ()
{
#ifdef midiInput
// Call MIDI.read the fastest you can for real-time performance.
MIDI.read();
//detection noteOff partout :
int NoteStates = 0;
for (byte note = 0; note < 128; note++) {
NoteStates = NoteStates | noteStateCh[note];
}
if (NoteStates != NoteStatesPrev) {
timeNoNoteSafety = millis();
NoteStatesPrev = NoteStates;
}
if (millis() - timeNoNoteSafety > 100) {
OSCMessage message;
message.setAddress(destIp, destPort);
message.beginMessage(oscAdrNoNoteSafety);
message.addArgInt32(NoteStates);
client.send(&message);
message.flush();
timeNoNoteSafety = millis();
}
#endif
padState = nintendo.buttons();
if (padState != padState_prev) {
NEStoOSC();
padState_prev = padState;
}
if (server.availableCheck() > 0) // indispensable pour que l'OSC reçu soit décodé
{
//nada
}
if (millis() - veille_ATU > 1500) // chien de garde
{
if (millis() - veille_ATU > 10000) {
asm volatile (" jmp 0");
}
}
else {}
ActiveSens();
Get_inputs(0x46);
if (millis() - time_send_NUN > 20) {
readNunchuck();
time_send_NUN = millis();
}
JoyX = analogRead(0) >> 2;
JoyY = analogRead(1) >> 2;
if ((JoyX != JoyX_prev || JoyY != JoyY_prev) && millis() - timeX > 20) {
timeX = millis();
JoyX_prev = JoyX;
JoyY_prev = JoyY;
JOYtoOSC();
}
if (millis() - timeRFID > 100) {
timeRFID = millis();
Get_RFID();
}
#ifdef pedal
if (pedalPresent == 1 && millis() - timeCheck > 15) {
timeCheck = millis();
Wire.requestFrom(0xC, 3); // request 3 bytes but only 2 will be send ???
while (Wire.available() )
{
pedalVal = Wire.read();
BPSideVal = Wire.read(); //4BP's
byte dummy = Wire.read();
//Serial.println(pedalVal);
}
BP_state[16] = bitRead(BPSideVal, 0);
BP_state[17] = bitRead(BPSideVal, 1);
BP_state[18] = bitRead(BPSideVal, 2);
BP_state[19] = bitRead(BPSideVal, 3);
}
if (millis() - timeSendPedal > 15 && pedalVal != prevPedalVal)
{
sendPedal();
timeSendPedal = millis();
prevPedalVal = pedalVal;
}
#endif //pedal
sendManualPulseGenerator(); //le plus souvent possible !
}to OSC
/*
void sendDinsolo(byte inputnumber, long int tmpDin)
{
//réalisation de la fin de l'adresse OSC :
if(inputnumber < 10)
{
oscAdrDin[8] = '0'; //0
oscAdrDin[9] = inputnumber+0x30; // 0x30 correspond au charactere 0
}
else if(inputnumber >= 10)
{
oscAdrDin[8] = '1';
oscAdrDin[9] = inputnumber+0x26; // 0x26 + 0xA = 0x30
}
else{}
//envoi du message
OSCMessage mes;
mes.setAddress(destIp,destPort);
mes.beginMessage(oscAdrDin);
mes.addArgInt32(tmpDin);
client.send(&mes);
mes.flush();
}
*/
void print ()
{
joyX.add (outbuf1[0]);
joyY.add (outbuf1[1]);
AxisX.add(outbuf1[2]);
AxisY.add(outbuf1[3]);
AxisZ.add(outbuf1[4]);
z_button1 = 1;
c_button1 = 1;
// byte outbuf[5] contains bits for z and c buttons
// it also contains the least significant bits for the accelerometer data
// so we have to check each bit of byte outbuf[5]
if ((outbuf1[5] >> 0) & 1)
{
z_button1 = 0;
}
if ((outbuf1[5] >> 1) & 1)
{
c_button1 = 0;
}
if (joyX.count() > 60 ){
joy_x_axis1 = 127;
joy_y_axis1 = 127;
if(outbuf1[0] < Xcenter) {
joy_x_axis1 = map(outbuf1[0],(float)joyX.minimum(),Xcenter,0,127);
joy_x_axis1 = constrain(joy_x_axis1,0,127);
}
else if(outbuf1[0] > Xcenter) {
joy_x_axis1 = map(outbuf1[0],Xcenter,(float)joyX.maximum(),127,255);
joy_x_axis1 = constrain(joy_x_axis1,127,255);
}
else{}
if(outbuf1[1] < Ycenter) {
joy_y_axis1 = map(outbuf1[1],(float)joyY.minimum(),Ycenter,0,127);
joy_y_axis1 = constrain(joy_y_axis1,0,127);
}
else if(outbuf1[1] > Ycenter) {
joy_y_axis1 = map(outbuf1[1],Ycenter,(float)joyY.maximum(),127,255);
joy_y_axis1 = constrain(joy_y_axis1,127,255);
}
else{}
accel_x_axis1 = AxisX.average();
accel_y_axis1 = AxisY.average();
accel_z_axis1 = AxisZ.average();
if(accel_x_axis1 != accel_x_axis1_prev ||
accel_y_axis1 != accel_y_axis1_prev ||
accel_z_axis1 != accel_z_axis1_prev ||
z_button1 != z_button1_prev ||
c_button1 != c_button1_prev ||
joy_x_axis1 != joy_x_axis1_prev ||
joy_y_axis1 != joy_y_axis1_prev
) {
NunchuckToOsc();
c_button1_prev = c_button1;
z_button1_prev = z_button1;
joy_x_axis1_prev = joy_x_axis1;
joy_y_axis1_prev = joy_y_axis1;
accel_x_axis1_prev = accel_x_axis1;
accel_y_axis1_prev = accel_y_axis1;
accel_z_axis1_prev = accel_z_axis1;
AxisX.clear();
AxisY.clear();
AxisZ.clear();
}
}
}
// Encode data to format that most wiimote drivers except
// only needed if you use one of the regular wiimote drivers
char nunchuk_decode_byte (char x)
{
x = (x ^ 0x17) + 0x17;
return x;
}
void ActiveSens() {
// active sens
if (millis() - time_send_AS > 1000)
{
send_RFID();
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrAsens);
//mesAS.addArgInt32(Xcenter);
//mesAS.addArgInt32(Ycenter);
mesAS.addArgInt32(AsensNb);
client.send(&mesAS);
mesAS.flush();
time_send_AS = millis();
BaseToOSC();
if(padState == 0) {
NEStoOSC();
}
if( z_button1 == 0 &&
c_button1 == 0 &&
joy_x_axis1 == 127 &&
joy_y_axis1 == 127
) {
NunchuckToOsc();
}
AsensNb++;
if (BP_state[0] ==0 &&
BP_state[1] ==0 &&
BP_state[2] ==0 &&
BP_state[3] ==0 &&
BP_state[4] ==0
) {
GP1toOSC();
}
if (BP_state[5] ==0 &&
BP_state[6] ==0 &&
BP_state[7] ==0 &&
BP_state[8] ==0 &&
BP_state[9] ==0
) {
GP2toOSC();
}
if (BP_state[10] ==0 &&
BP_state[11] ==0 &&
BP_state[12] ==0
) {
JOYtoOSC();
}
}
else{
}
}
void NEStoOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrNesPad);
mesAS.addArgInt32((byte)bitRead(padState,4)); //up
mesAS.addArgInt32((byte)bitRead(padState,5)); //dwn
mesAS.addArgInt32((byte)bitRead(padState,6)); //left
mesAS.addArgInt32((byte)bitRead(padState,7)); //right
mesAS.addArgInt32((byte)bitRead(padState,2)); // select
mesAS.addArgInt32((byte)bitRead(padState,3)); //start
mesAS.addArgInt32((byte)bitRead(padState,1)); //B
mesAS.addArgInt32((byte)bitRead(padState,0)); //A
client.send(&mesAS);
mesAS.flush();
}
void NunchuckToOsc() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrNunchuck);
mesAS.addArgInt32(c_button1);
mesAS.addArgInt32(z_button1);
mesAS.addArgInt32(joy_x_axis1);
//mesAS.addArgInt32(outbuf1[0]);
mesAS.addArgInt32(joy_y_axis1);
//mesAS.addArgInt32(outbuf1[1]);
mesAS.addArgInt32(accel_x_axis1);
mesAS.addArgInt32(accel_y_axis1);
mesAS.addArgInt32(accel_z_axis1);
client.send(&mesAS);
mesAS.flush();
}
void GP1toOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrGamePad1);
mesAS.addArgInt32((byte)BP_state[0]); //up
mesAS.addArgInt32((byte)BP_state[1]); //dwn
mesAS.addArgInt32((byte)BP_state[2]); //left
mesAS.addArgInt32((byte)BP_state[3]); //right
mesAS.addArgInt32((byte)BP_state[4]); // BP
client.send(&mesAS);
mesAS.flush();
}
void GP2toOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrGamePad2);
mesAS.addArgInt32((byte)BP_state[5]); //up
mesAS.addArgInt32((byte)BP_state[6]); //dwn
mesAS.addArgInt32((byte)BP_state[7]); //left
mesAS.addArgInt32((byte)BP_state[8]); //right
mesAS.addArgInt32((byte)BP_state[9]); // BP
client.send(&mesAS);
mesAS.flush();
}
void JOYtoOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrJoystick);
mesAS.addArgInt32((int)JoyX); //up
mesAS.addArgInt32((int)JoyY); //dwn
mesAS.addArgInt32((byte)BP_state[10]); //BP
mesAS.addArgInt32((byte)BP_state[11]); //BP
mesAS.addArgInt32((byte)BP_state[12]); //BP
client.send(&mesAS);
mesAS.flush();
}
void BaseToOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrBase);
mesAS.addArgInt32((byte)BP_state[13]); //
mesAS.addArgInt32((byte)BP_state[14]); //
client.send(&mesAS);
mesAS.flush();
}
void Get_RFID() {
Wire.requestFrom(0x5, 7); // request 7 byte from slave device #4
while(Wire.available()) // slave may send less than requested
{
buf[0] = Wire.read ();// receive byte
buf[1] = Wire.read ();// receive byte
buf[2] = Wire.read ();// receive byte
buf[3] = Wire.read ();// receive byte
buf[4] = Wire.read ();// receive byte
buf[5] = Wire.read ();// receive byte
buf[6] = Wire.read ();// receive byte
}
if(buf[0] != buf_prev[0]
|| buf[1] != buf_prev[1]
|| buf[2] != buf_prev[2]
|| buf[3] != buf_prev[3]
|| buf[4] != buf_prev[4]
|| buf[5] != buf_prev[5]
|| buf[6] != buf_prev[6]
) {
buf_prev[0] = buf[0];
buf_prev[1] = buf[1];
buf_prev[2] = buf[2];
buf_prev[3] = buf[3];
buf_prev[4] = buf[4];
buf_prev[5] = buf[5];
buf_prev[6] = buf[6];
send_RFID();
}
}
void send_RFID() {
OSCMessage mes;
mes.setAddress(destIp,destPort);
mes.beginMessage(oscAdrRFID);
mes.addArgInt32(buf[0]); //MSB
mes.addArgInt32(buf[1]);
mes.addArgInt32(buf[2]);
mes.addArgInt32(buf[3]);
mes.addArgInt32(buf[4]);
mes.addArgInt32(buf[5]);
mes.addArgInt32(buf[6]); //LSB
client.send(&mes);
mes.flush();
}
void sendManualPulseGenerator() {
Wire.requestFrom(0x4, 1); // request 1 byte from slave device #4
char LSB;
while(Wire.available()) // slave may send less than requested
{
LSB = Wire.read ();// receive byte
//BP_MPG = ~Wire.read ();// receive byte
}
data1 += (char)LSB; // increments
data2 += (char)LSB; // absolue 600 tours
//data2 doit repasser à 0 sur un multiple de tours complets...
if(data2 >= 62517) { //on est entrain de passer par le 0
//data2 = 59999 - (65535 - data2);
data2 = data2 - 5536;
}
else if(data2 >= 60000) { //on a fait plus de 100 tours !
data2 = data2 - 60000;
}
else{}
data3 += (char)LSB; // pot xxx points avec butée basse et haute
if(data3 <= minData3) {
data3 = minData3;
}
if(data3 >= maxData3) {
data3 = maxData3;
}
long int currenttime = millis();
if(currenttime - time_roue > 70 && (data1 != 0 || data2 != data2_prev || data3 != data3_prev || data4 != 0)) {
time_roue = currenttime;
data4 = data1 - data1_prev; // cacul de l'acceleration angulaire
OSCMessage messageMPG;
messageMPG.setAddress(destIp,destPort);
messageMPG.beginMessage(oscAdrMPG);
messageMPG.addArgInt32(data1);
messageMPG.addArgInt32(data2);
messageMPG.addArgInt32(data3);
messageMPG.addArgInt32(data4);
client.send(&messageMPG);
data1_prev = data1;
data1 = 0;
data2_prev = data2;
data3_prev = data3;
jetonMPG = 0;
}
else if(currenttime - time_roue > 70 && data1 == 0 && jetonMPG == 0)
{
time_roue = currenttime;
data4 = data1 - data1_prev; // calcul de l'acceleration angulaire
OSCMessage messageMPG;
messageMPG.setAddress(destIp,destPort);
messageMPG.beginMessage(oscAdrMPG);
messageMPG.addArgInt32(data1);
messageMPG.addArgInt32(data2);
messageMPG.addArgInt32(data3);
messageMPG.addArgInt32(data4);
client.send(&messageMPG);
messageMPG.flush();
jetonMPG = 1;
}
else{}
}
void sendPedal() {
OSCMessage messagePedal;
messagePedal.setAddress(destIp, destPort);
messagePedal.beginMessage(oscAdrPedal);
messagePedal.addArgInt32((uint8_t)pedalVal);
client.send(&messagePedal);
messagePedal.flush();
}
void jackBPToOSC() {
OSCMessage mesAS;
mesAS.setAddress(destIp,destPort);
mesAS.beginMessage(oscAdrDin);
mesAS.addArgInt32((byte)BP_state[16]); //
mesAS.addArgInt32((byte)BP_state[17]); //
mesAS.addArgInt32((byte)BP_state[18]); //
mesAS.addArgInt32((byte)BP_state[19]); //
client.send(&mesAS);
mesAS.flush();
}
//*******************************************************