Wireless gyro BNO055 (work in progress)
Content
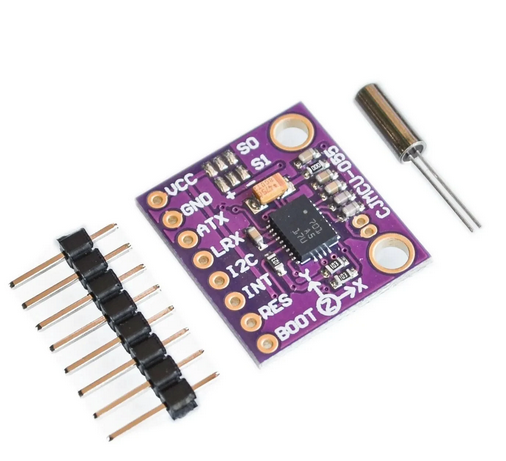
souder le cristal sur les 2 bornes (à coté de "CJ")

https://cdn-learn.adafruit.com/downloads/pdf/adafruit-bno055-absolute-orientation-sensor.pdf

The .getQuat function returns a Quaternion, which is often easier and more accurate to work with than Euler angles when doing sensor fusion or data manipulation with raw sensor data. You can get a quaternion data sample via the following code:
imu::Quaternion quat = bno.getQuat();
/* Display the quat data */
Serial.print("qW: ");
Serial.print(quat.w(), 4);
Serial.print(" qX: ");
Serial.print(quat.x(), 4);
Serial.print(" qY: ");
Serial.print(quat.y(), 4);
Serial.print(" qZ: ");
Serial.print(quat.z(), 4);
Serial.println("");capacitive sensor
utiliser arduino lib = adafruit MPR121
https://www.sparkfun.com/datasheets/Components/MPR121.pdf
a faire
- souder cristal
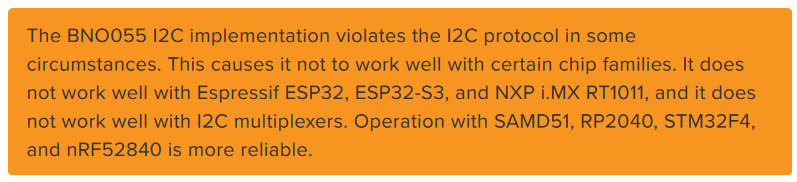
- adapter exemple adafruit/bno055 pour ESP8266 (utiliser le code de wireless gyro)
- tester module de switchs capacitifs HW 017
https://mischianti.org/bno055-for-esp32-esp8266-and-arduino-wiring-and-advanced-bosch-library-2/